
Chad Keever, Projectile Launcher
Kendall McConnel, Control of a Plotter
Jonah Elgart, Guidance by IR Beacon
Miki Havlickova, IR Remote Control
Jessica Bowles-Martinez, Guidance by Light
Matt Seegmiller, Master/Slave IR Control
Jitin Asnaani, Invertible Robot
Hi, I'm Jonah Elgart and for my final project in SP.285, a robotics and mechatronics class taught in ESG (Experimental Study Group), I created a Lego robot that chases or flees an infrared beacon.
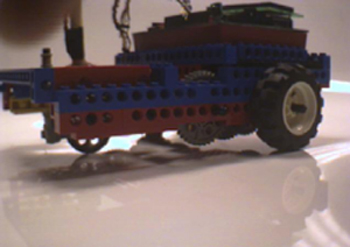
My robot car is very simple. It has two wheels, each connected to its own motor. The two motors are driven at different speeds to steer the car. The back wheel is mounted on a really cool caster that I built with Eric (one of the instructor dudes).
|
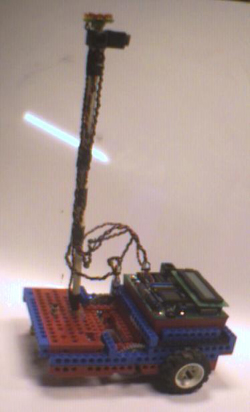
My robot.
|
The car. |
The car's rear side. |

|
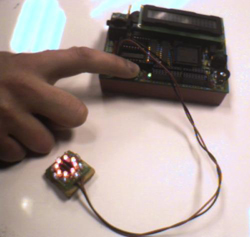
Infrared transmitter. | An infrared signal is broadcasted from a transmitter hooked up to a handyboard (one of those circuity things which is a minicomputer). |
|
Infrared receiver. | The signal is detected by the tower, which consists of three directional infrared receiver doohickeys, oriented in three quadrants. |

Click "code" (C) to see the IC code I wrote to make the robot flee or chase the signal. To change from flee to chase you simply reverse the polarity of the motors.